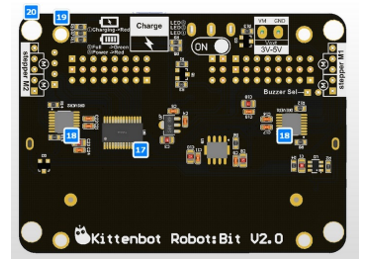
Robotbit ออกแบบมาสำหรับนักเรียน คุณลักษณะของบอร์ด ส่วนประกอบของบอร์ด
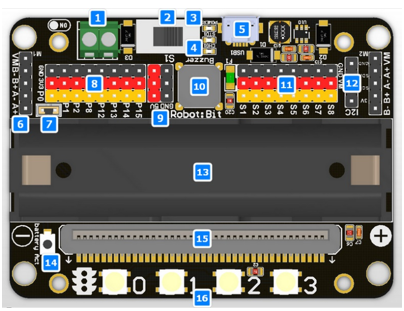
1. 5V external power input(with anti-reverse protection)
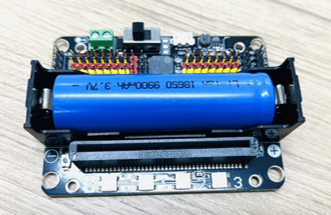
17. Servo driver (PCA9685) ที่ใส่แบตเตอรี่ 18650
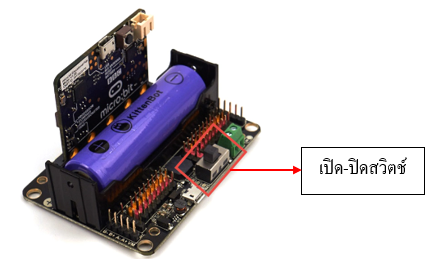
สวิตซ์เปิด-ปิด บอร์ด
จากภาพด้านบนให้ดันสวิตซ์ไปด้านซ้ายมือเป็นการเปิดการใช้งานบอร์ด
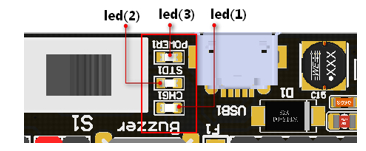
พอร์ตการชาร์จสามารถชาร์จแบตเตอรี่ 18650 ด้วยแหล่งจ่ายไฟ USB 5V ใช้เวลาประมาณ 2.5 ชั่วโมงในการชาร์จแบตเตอรี่ให้เต็มด้วยแหล่งจ่ายไฟ 5V1A ไฟแสดงการชาร์จจะสว่างเป็นสีเขียวเมื่อชาร์จเต็มแล้ว ไฟแสดงสถานะ
Led (1) เป็นตัวบ่งชี้การชาร์จ ซึ่งจะสว่างขึ้นเมื่อกำลังชาร์จแบตเตอรี่ Micro:bit slot
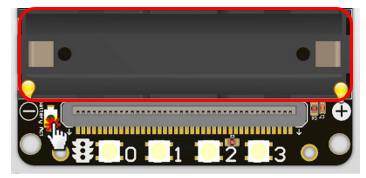
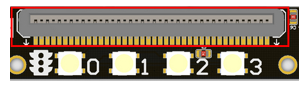
ใช้สำหรับติดตั้ง Micro:bit การวางแนวที่ถูกต้อง: ปุ่ม A และ B ของ Micro:bit ควรหันออกด้านนอก
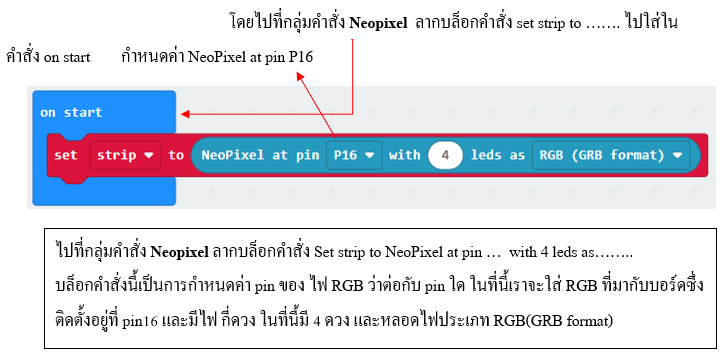
หากเสียบไม่ถูกต้อง เพียงถอดแล้วทำการเสียบใหม่ให้ถูกต้อง Micro:bit / Robotbit จะไม่เสียหาย ไฟ LED RGB ที่ติดตั้งที่บอร์ดมี 4 ดวงเชื่อมต่อกับขา 16 (P16)
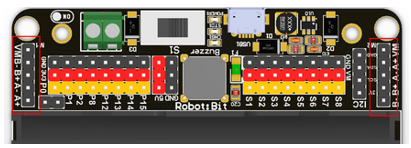
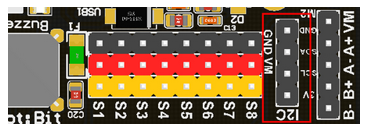
Port Servo
• เมื่อใช้แบตเตอรี่ 18650 สามารถรองรับ servo ทั้งหมด 8 ตัวที่มีกระแสรวมน้อยกว่า 2A อย่าใช้เซอร์โวกระแสสูงเช่น MG995 เพื่อหลีกเลี่ยงไม่ให้ Robotbit เสียหาย Motor Port
• สามารถใช้มอเตอร์กระแสตรงได้ทั้งหมด 4 ตัว หรือสามารถใช้สเต็ปเปอร์มอเตอร์ได้ 2 ตัว กระแสรวมต้องน้อยกว่า 2A อย่าใช้มอเตอร์กระแสสูงเพื่อหลีกเลี่ยงความเสียหายต่อ Robotbit Buzzer and Jumper
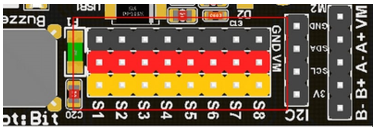
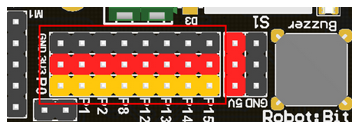
• ตามค่าเริ่มต้น jumper Buzzer จะเชื่อมต่อเพื่อเปิดใช้งานBuzzer โดยเชื่อมต่อกับ Pin 0 Micro:bit IO Pins
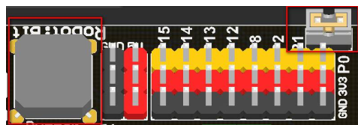
Pin IO ของ Micro:bit (P0-P2, P8, P12-15) ส่วนใหญ่ P0-P2 รองรับทั้งโมดูลอะนาล็อกและดิจิตอล P8, P12-P15 ใช้สำหรับอินพุตและเอาต์พุตดิจิทัลเท่านั้น Pin มีแรงดันไฟฟ้า 3.3V สำหรับโมดูลที่ต้องการไฟ 5V ให้ใช้ Pin 5V ถัดจากพอร์ตเซอร์โว Port I2C
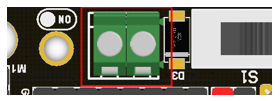
รองรับโมดูล I2C มีแรงดันไฟฟ้า 3.3V 2 Pin External power port
• พอร์ตนี้รองรับไฟ DC 5V ขอแนะนำให้ใช้ไฟ 5v ที่มากกว่า 2A เมื่อใช้มอเตอร์และเซอร์โวแรงบิดสูง
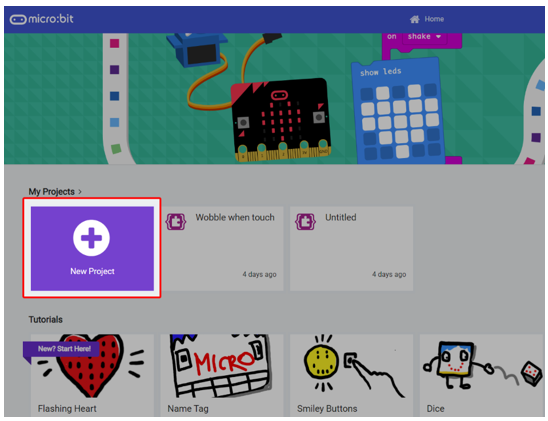
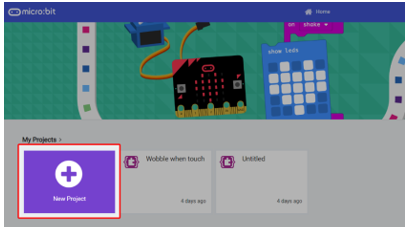
1. เข้าเว็บไซต์ https://makecode.microbit.org/ แล้วคลิกเมนู New Project
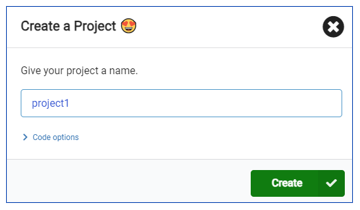
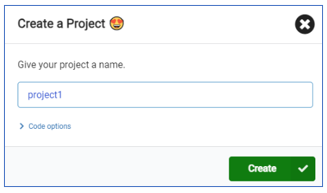
2. ตั้งชื่อโปรเจ็คต์ จากนั้นคลิกปุ่ม Create
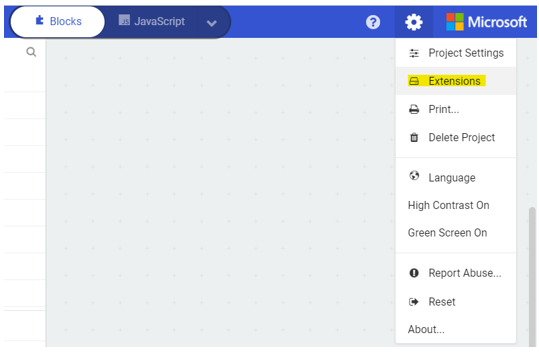
3. การติดตั้งให้คลิกที่ รูป
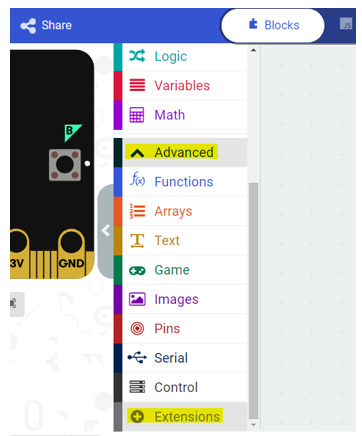
หรืออีกวิธีให้เปิดเมนูขั้นสูงแล้วเลือกส่วนขยาย
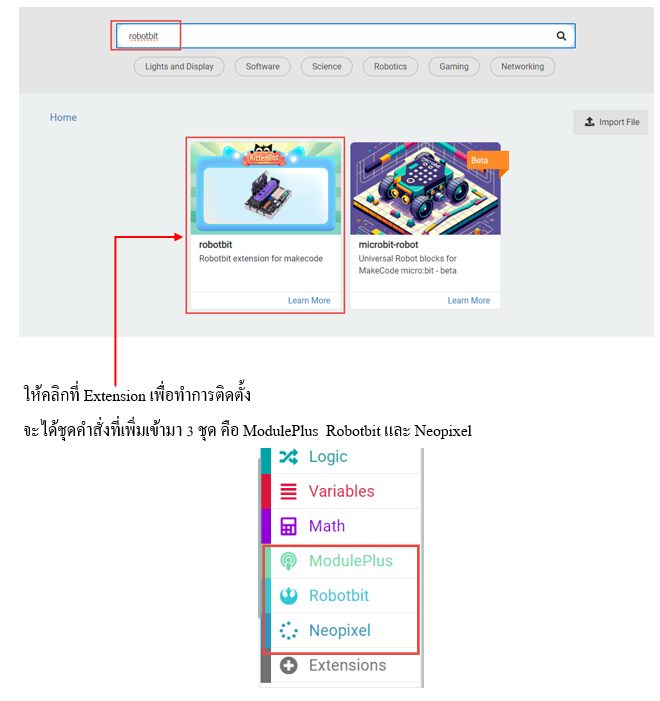
4. ติดตั้ง Extension ในช่องค้นหาใส่คำว่า “robotbit” แล้วกดปุ่ม Enter
อุปกรณ์ 1. บอร์ดขยาย Robotbit
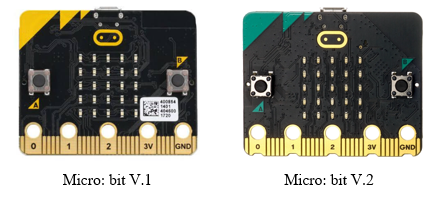
2. บอร์ด Micro:bit
3. ถ่านชาร์จ 18650 1 ก้อน
4. สาย Micro USB สำหรับเชื่อมต่อบอร์ด Micro:bit กับคอมพิวเตอร์
ขั้นตอนการทำ
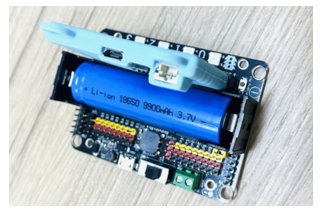
2. บอร์ด Micro:bit เสียบเข้ากับบอร์ดขยาย Robotbit
3. เปิดการใช้งานบอร์ด ปิดสวิตช์ ด้านหลัง ดังรูป
เริ่มการเขียนโปรแกรม
2. ตั้งชื่อโปรเจ็คต์ จากนั้นคลิกปุ่ม Create
3. ทำการติดตั้ง Extension ตัว คือ Robotbit
4. ตั้งค่าการกำหนด Pin ของไฟ
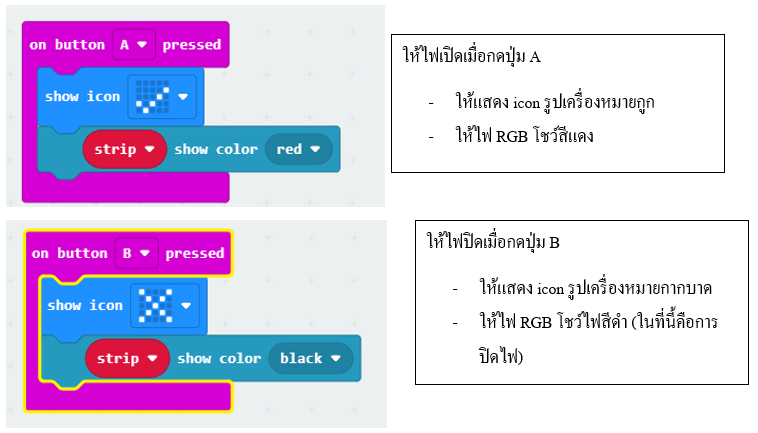
5. กลุ่มคำสั่ง input ลากบล็อกคำสั่ง on button A pressed
ให้ทำการโหลดโปรแกรมลงบอร์ด ผลลัพธ์
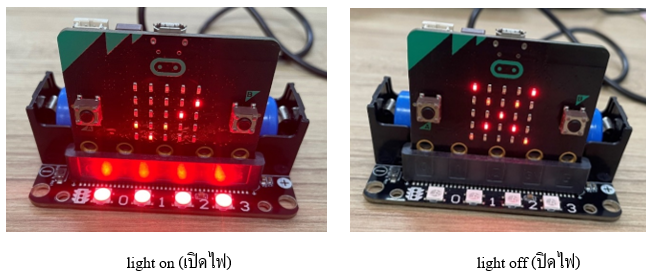
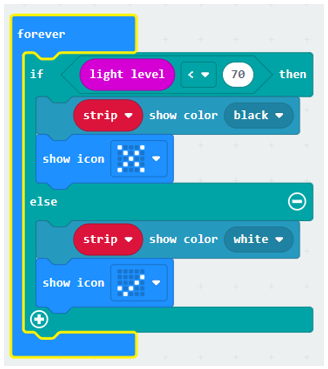
การเขียนโปรแกรมสั่งงานเปิด-ปิด ไฟ ด้วยการเช็คค่าแสงสว่าง
การเขียนโปรแกรมสั่งงาน Servo อุปกรณ์ 1. บอร์ดขยาย Robotbit
2. บอร์ด Micro:bit
3. ถ่านชาร์จ 18650 1 ก้อน
4. สาย Micro USB สำหรับเชื่อมต่อบอร์ด Micro:bit กับคอมพิวเตอร์
5. Servo 180
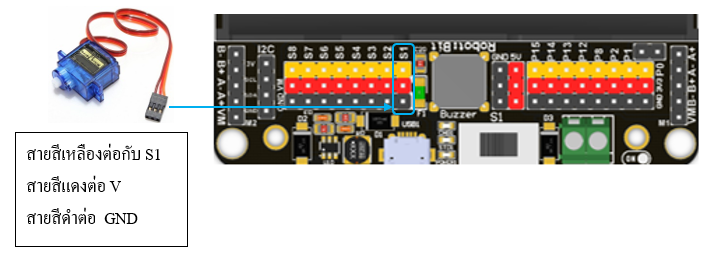
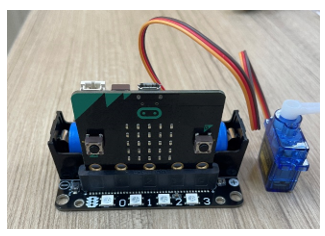
ขั้นตอนการทำ 1. การต่อ servo
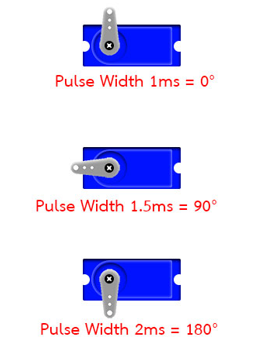
การหนดตำแหน่งของ Servo
เริ่มการเขียนโปรแกรม 1. เข้าเว็บไซต์ https://makecode.microbit.org/ แล้วคลิกเมนู New Project
2. ตั้งชื่อโปรเจ็คต์ จากนั้นคลิกปุ่ม Create
3. ทำการติดตั้ง Extension ตัว คือ Robotbit
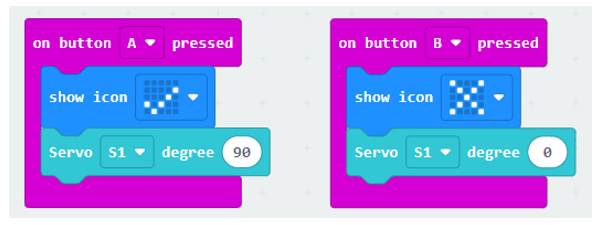
4. กำหนดค่าเริ่มต้นของ Servo เมื่อมีเริ่มต้น Run โปรแกรม กำหนด pin servo ที่ S1 องศาเท่ากับ 0
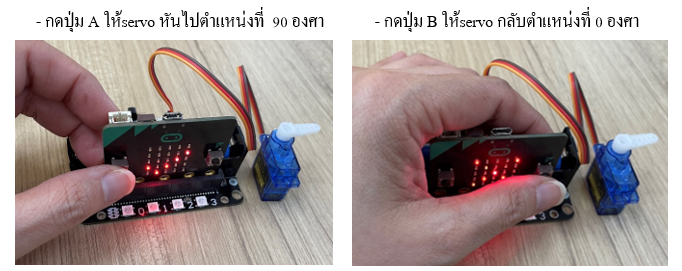
5. เขียนคำสั่งให้ servo ทำงาน โดยการ - กดปุ่ม A ให้servo หันไปตำแหน่งที่ 90 องศา - กดปุ่ม B ให้servo กลับตำแหน่งที่ 0 องศา
โหลดโปรแกรมนี้ลงบอร์ด Micro:bit ผลลัพธ์
การเขียนโปรแกรมสั่งงานเปิด- ปิด เสียง อุปกรณ์ 1. บอร์ดขยาย Robotbit
2. บอร์ด Micro:bit
3. ถ่านชาร์จ 18650 1 ก้อน
4. สาย Micro USB สำหรับเชื่อมต่อบอร์ด Micro:bit กับคอมพิวเตอร์
เริ่มการเขียนโปรแกรม
2. ตั้งชื่อโปรเจ็คต์ จากนั้นคลิกปุ่ม Create
3. ทำการติดตั้ง Extension ตัว คือ Robotbit
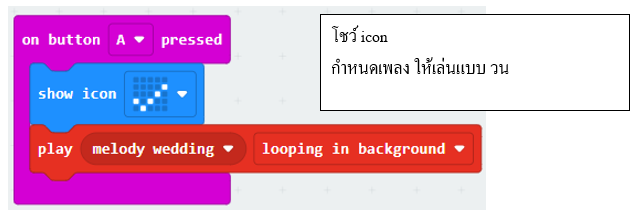
4. ในบอร์ดขยาย Robotbit จะมี Buzzer สามารถเล่นเสียงได้ - กำหนดเริ่มต้นความดัง
5. กำหนดปุ่ม A ให้เปิดเพลง แบบวน
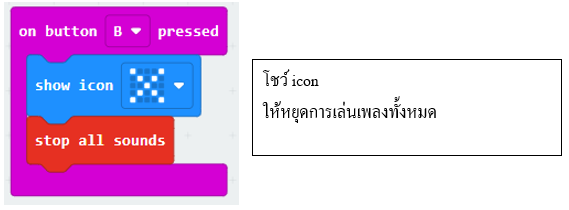
6. กำหนดปุ่ม B ให้ปิดเพลง
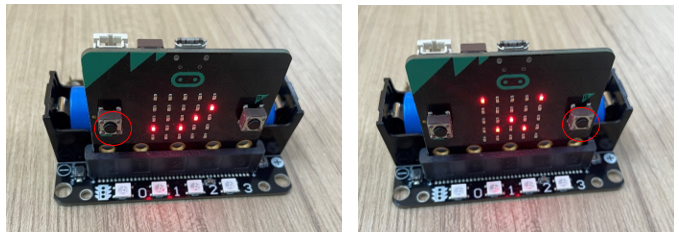
โหลดโปรแกรมลงบอร์ด ผลลัพธ์ เมื่อกดปุ่ม A ก็จะเล่นเสียงตามที่กหนด เมื่อกดปุ่ม B ก็จะหยุดเล่นเสียงทั้งหมด
|






 เลือก Extensions
เลือก Extensions