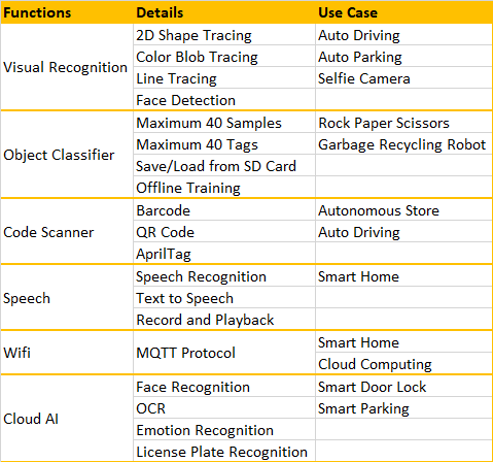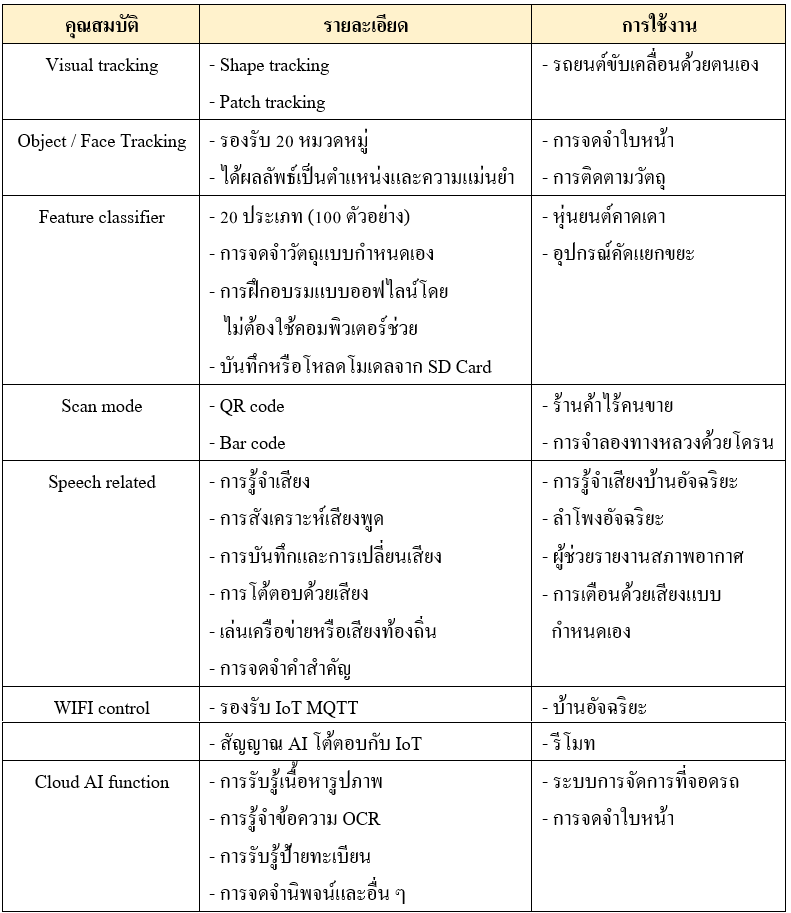
AI Camera KOI เป็นโมดูลปัญญาประดิษฐ์ออฟไลน์ที่พัฒนาโดย Kittybot มีวัตถุประสงค์เพื่อให้เป็นแพลตฟอร์มที่ใช้งานง่ายสำหรับนักเรียนและผู้ที่ชื่นชอบ KOI เป็นโมดูลแบบรวมที่รวมชิป AI, กล้อง, ไมโครโฟน, ลำโพง, จอแสดงผล IPS และชิป Wi-fi ไว้ด้วยกัน โดยมีความสามารถมากมาย ทั้งการจดจำภาพ การตรวจจับและการจดจำใบหน้า การจัดประเภทวัตถุ การรู้จำเสียงและข้อความเป็นคำพูด เป็นต้น ฟังก์ชั่นของ KOI
27 ข้อมูลจำเพาะ (Specifications)
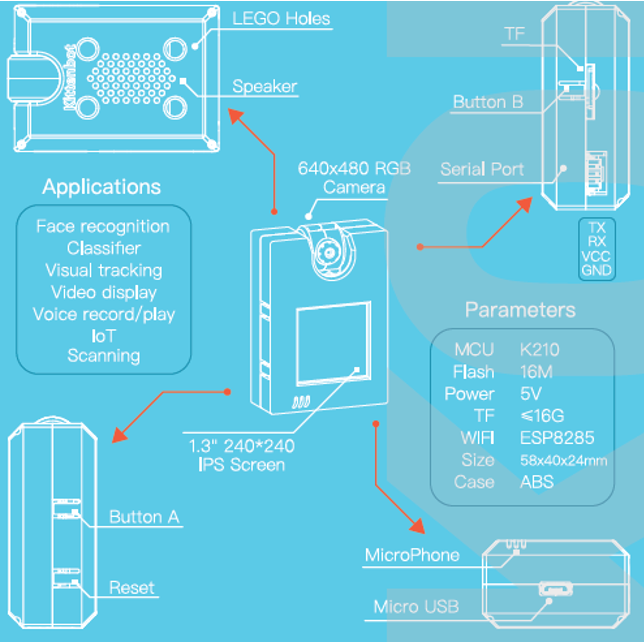
ซีพียู: K210 แพลตฟอร์มการเขียนโปรแกรมที่รองรับ: ส่วนประกอบของ KOI
1. เลนส์แบบปรับหมุนได้ (Rotate the lens) เลนส์หมุนได้ตั้งแต่ 0 ถึง 180 องศา
3. กล้องหลัง (Camera rear) กล้องและหน้าจออยู่ในทิศทางตรงกันข้าม ดังแสดงในรูป โดยทั่วไปจะใช้สำหรับสแกนบาร์โค้ด, QR Code, การติดตามเส้น ฯลฯ
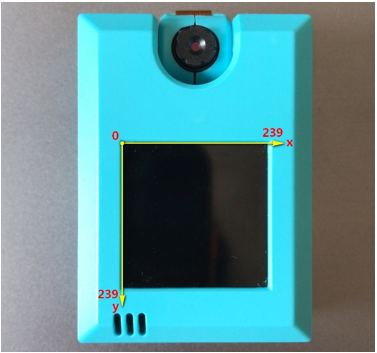
4. หน้าจอแสดงผล (Screen and screen coordinate system) หน้าจอเป็นหน้าจอ IPS ความละเอียดสูง 240 x 240 พิกเซล โดยมีระบบพิกัดเริ่มต้นที่มุมซ้ายบนของหน้าจอ ใช้เพื่อแสดงสตรีมข้อมูลแบบเรียลไทม์ของกล้องและข้อมูลเชิงโต้ตอบ
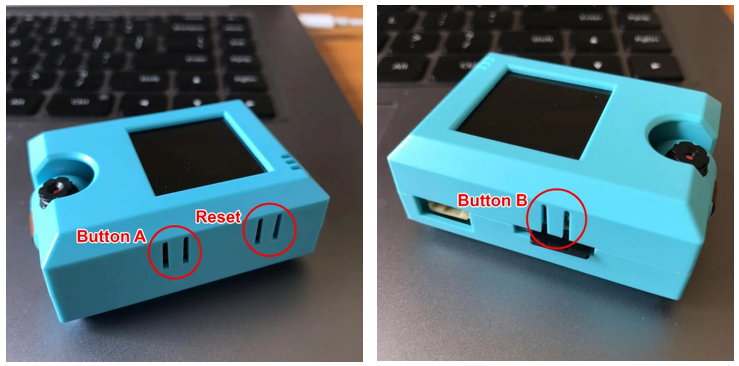
5. ปุ่ม A, B และปุ่มรีเซ็ต มีปุ่มตั้งโปรแกรมได้ที่ด้านซ้ายและด้านขวาของโมดูล คล้ายกับปุ่ม Microbit A และ B
6. ไมโครโฟน (microphone) มีไมโครโฟนอยู่ที่ด้านล่างซ้ายของหน้าจอ ระยะวิทยุประมาณ 50 ซม.
7. พอร์ตข้อมูล USB (USB data port) พอร์ตข้อมูลนี้ใช้เพื่ออัพเดตเฟิร์มแวร์ของโมดูลหรือจ่ายไฟให้กับโมดูล
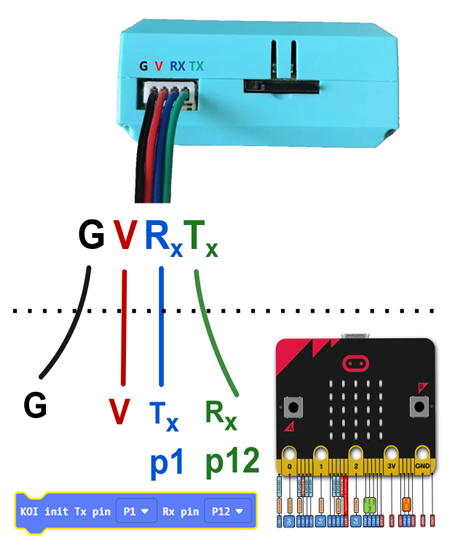
8. พอร์ตอนุกรม PH 2.0 4 PIN (PH2.0 4PIN serial port) ใช้สำหรับการสื่อสารแบบอนุกรมกับบอร์ดไมโครคอนโทรลเลอร์ Microbit, Arduino หรือบอร์ดอื่น ๆ ที่เป็นอนุกรม
9. ช่องเสียบการ์ด (TF card slot) เป็นช่องเสียบการ์ดป๊อปอัพและรองรับหน่วยความจำสูงสุดคือ 16GB. ซึ่งสามารถจัดเก็บเสียง รูปภาพ โมเดลการเรียนรู้ของเครื่อง ฯลฯ
10. ลำโพง (Speaker) สำหรับเล่นไฟล์เสียงในการ์ดหน่วยความจำ
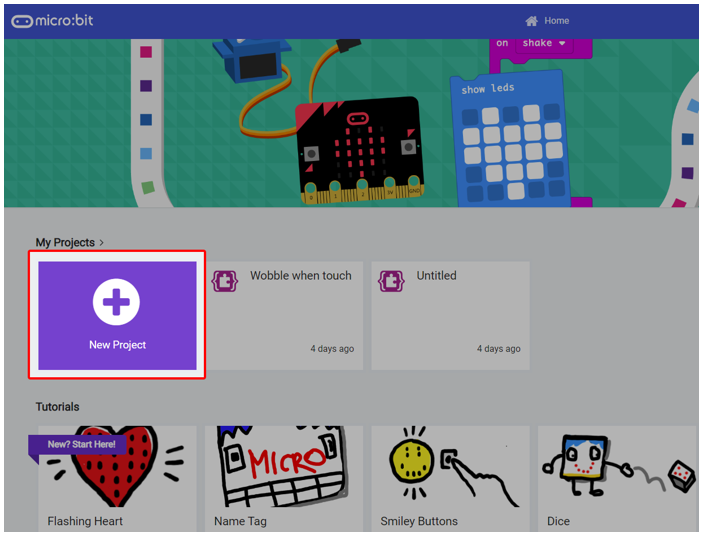
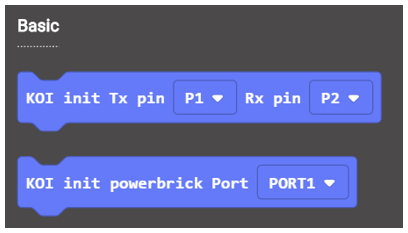
1. เชื่อมต่อบอร์ด micro:bit เข้ากับคอมพิวเตอร์ จากนั้นเข้าเว็บไซต์ https://makecode.microbit.org/ แล้วคลิกเมนู New Project
2. ตั้งชื่อโปรเจ็คต์ จากนั้นคลิกปุ่ม Create
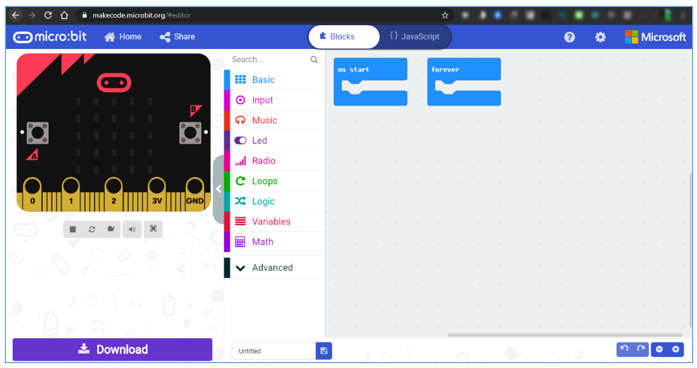
3. จะเข้าสู่หน้าจออินเทอร์เฟซการเขียนโปรแกรมออนไลน์
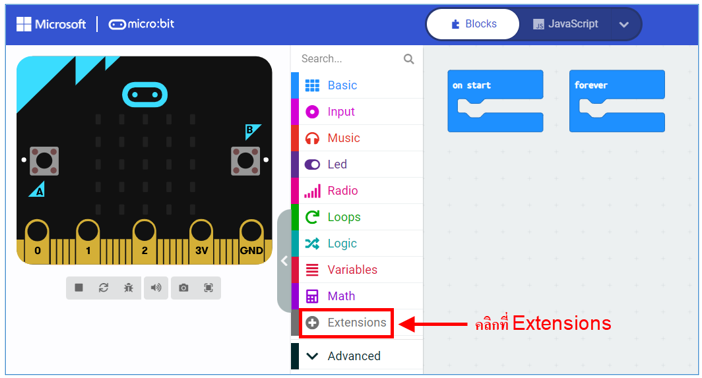
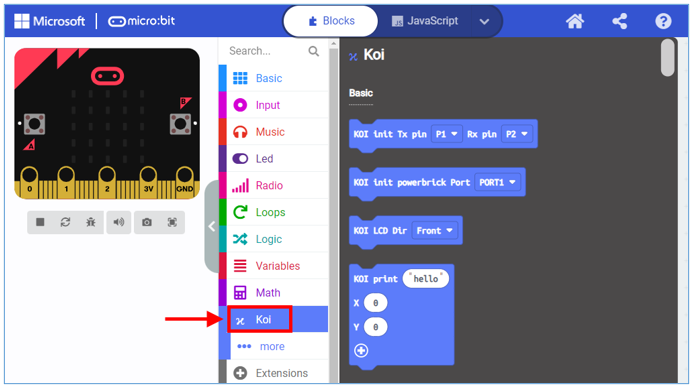
4. ดาวน์โหลด Extensions ที่ชื่อว่า “koi” โดยคลิกที่ Extensions
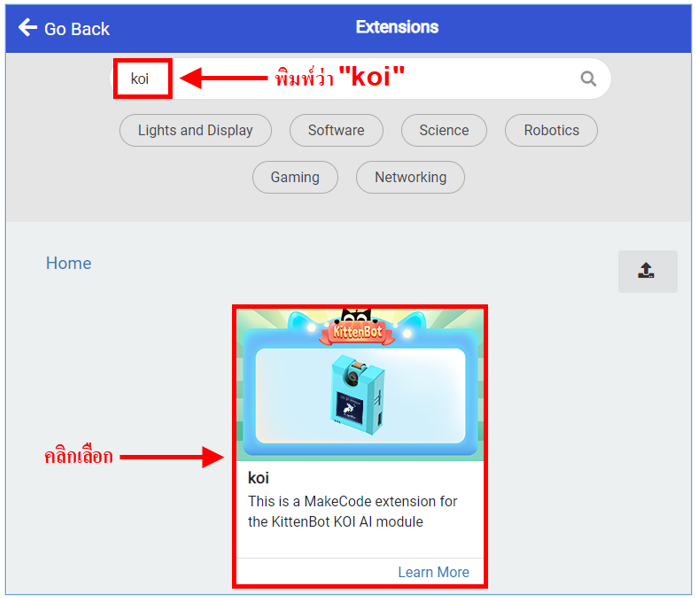
5. พิมพ์คำว่า “koi” จากนั้นคลิกเลือก koi เพื่อทำการเพิ่ม Extension ในการใช้งานกล้อง KOI
6. จะปรากฏเมนู Koi เข้ามาในหน้าจออินเทอร์เฟซ ดังรูป
ชุดคำสั่งที่อยู่ใน Extension: Koi
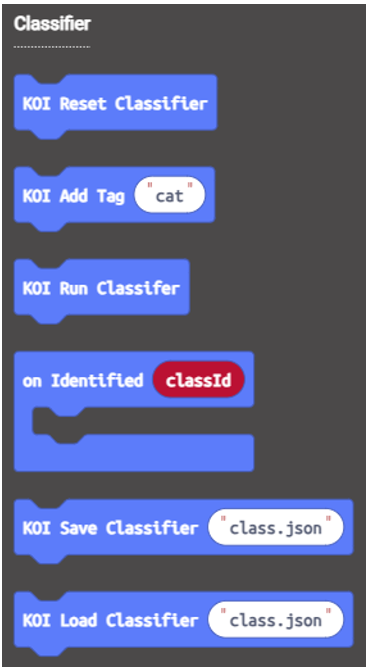
2. แยกแยะวัตถุ (classifier)
3. ถ่ายรูปและแสดงรูปภาพ (Screenshots and displays) เมื่อเรียกใช้บล็อกคำสั่งถ่ายรูป รูปภาพจะถูกบันทึกลงในการ์ดหน่วยความจำ โดยมีชื่อไฟล์รูปภาพที่ตามที่กำหนด เช่น "XXX.png" เมื่อเรียกบล็อกคำสั่งการแสดงผล ระบบจะค้นหารูปภาพชื่อ "XXX.png" ในการ์ดหน่วยความจำ และแสดงเป็นเวลาประมาณ 1 วินาที หากไม่มีรูปภาพดังกล่าวในการ์ดหน่วยความจำ บนหน้าจอจะไม่สามารถเปิดไฟล์ได้
4. แสดงข้อความบนหน้าจอ (Displaying information) โดยหน้าจอมีการรีเฟรชอยู่ตลอดเวลา ข้อมูลจะแสดงแล้วหายไป โดยมีพิกัด X, Y ในกำหนดพิกัดเริ่มต้นของสตริง
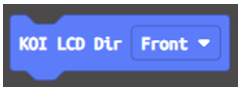
5. ตั้งค่าการแสดงผลหน้าจอ (Setting screen display) มีสองตัวเลือก คือ ด้านหน้า (front) และด้านหลัง (rear) เนื่องจากโมดูลไม่สามารถตรวจจับได้โดยอัตโนมัติว่ากล้องปัจจุบันอยู่ด้านหน้าหรือด้านหลัง ดังนั้นจะต้องเลือกการตั้งค่าด้วยตนเอง
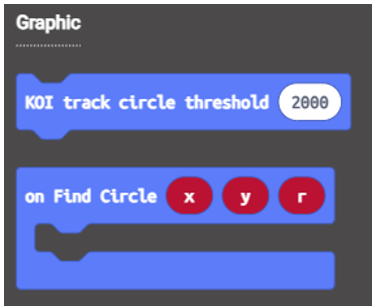
6. การตรวจจับรูปวงกลม (Circular tracking) ยิ่งเกณฑ์มากเท่าใด สัญญาณรบกวนก็จะยิ่งถูกกำจัดออกไป แต่การตรวจจับก็จะยิ่งยากขึ้นเท่านั้น โดย x และ y คือพิกัดแนวนอนและแนวตั้งของวงกลมที่ตรวจพบบนหน้าจอ และ r คือรัศมีของวงกลม
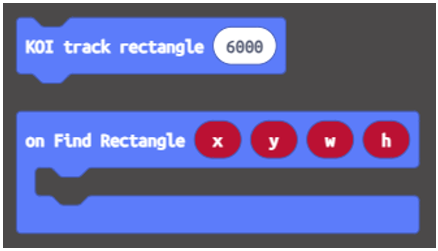
7. การตรวจจับสี่เหลี่ยม (Rectangle tracking) เมื่อ w และ h เป็นเป็นความกว้างและความสูงของรูปสี่เหลี่ยม
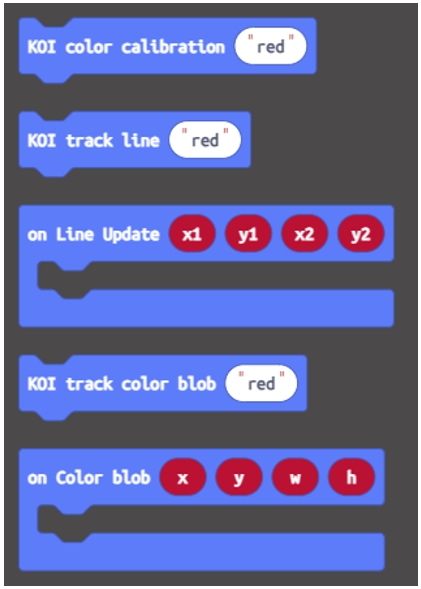
8. การตรวจจับสีเส้นและสี (Color line and color tracking) โดยจะต้องดำเนินการปรับเทียบสีก่อน โดยพิกัดของเส้นภาพคือพิกัดสองจุดของส่วนของเส้นตรง (x1, y1) (x2, y2) ส่วนพารามิเตอร์บล็อกสีเหมือนกับการติดตามสี่เหลี่ยม
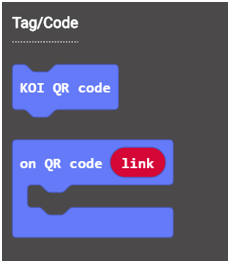
9. คิวอาร์โค้ด (QR Code) สแกน QR Code และส่งคืนผลลัพธ์ โดยความกว้างของโค้ด QR Code จะต้องไม่น้อยกว่า 3.5 ซม. หาก QR Code มีขนาดเล็กเกินไป ความละเอียดจะน้อยเกินไป
10. บาร์โค้ด (Barcodes) สแกนบาร์โค้ดและส่งคืนผลลัพธ์บาร์โค้ด โดยบาร์โค้ดต้องไม่น้อยกว่า 3.5 ซม. หากบาร์โค้ดมีขนาดเล็กเกินไป ความละเอียดจะน้อยเกินไป
11. การตรวจจับใบหน้า (Face model yolo detection) การเริ่มต้นจำเป็นต้องโหลดโมเดลใบหน้า ทุกครั้งที่มีการเรียกการตรวจจับใบหน้า จะส่งคืนพิกัด x, y ของใบหน้า
|