| 1. หุ่นยนต์ Teacher Robot คือหุ่นยนต์รุ่นใด |
| |
1. Sanbot Nano |
2. Sanbot Elf |
| |
3. Sanbot Max |
4. Sun robot |
| |
| 2. การสร้างหุ่นยนต์ Teacher Robot ใช้บอร์ดอะไรบ้าง |
| |
1. บอร์ด Micro:Bit และบอร์ด KidBright |
2. บอร์ด Arduino และบอร์ด Raspberry Pi |
| |
3. บอร์ด Micro:Bit และบอร์ด Arduino |
4. บอร์ด KidBright และบอร์ด Raspberry Pi |
| |
|
| 3. หุ่นยนต์ Teacher Robot ใช้ล้อแบบใด |
| |
1.  |
2.  |
| |
3.  |
4.  |
| |
|
| 4. บอร์ด Raspberry Pi รองรับระบบปฏิบัติการใด |
| |
1. Windows |
2. Linux |
| |
3. Android |
4. iOS |
| |
|
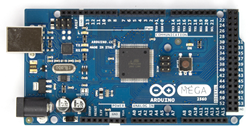
| 5. บอร์ด Arduino สำหรับนำมาทำหุ่นยนต์ Teacher Robot เป็นรุ่นใด |
| |
1. Arduino Uno |
2. Arduino Mega 2560 |
| |
3. Arduino Nano |
4. Arduino Mini |
| |
|
| 6. การเขียนโปรแกรมใส่บอร์ด Arduino จะต้องใช้โปรแกรมใด |
| |
1. โปรแกรม Thonny IDE |
2. โปรแกรม Arduino CC |
| |
3. โปรแกรม Android Studio |
4. โปรแกรม Arduino IDE |
| |
| 7. ข้อใดเป็นบอร์ดขยายขาของ Arduino Mega 2560 |
| |
1.  |
2. 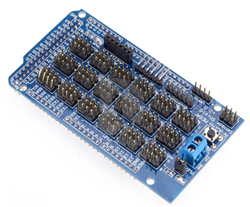 |
| |
3.  |
4.  |
| |
| 8. ข้อใดเป็นคุณสมบัติของ Infrared Sensor |
| |
1. ตรวจเช็คระยะห่างของวัตถุ |
2. ตรวจจับการเคลื่อนไหว |
| |
3. ตรวจวัดค่าแสง |
4. ถูกทุกข้อ |
| |
|
| 9. แขนหุ่นยนต์ Teacher Robot ใช้มอเตอร์แบบใด |
| |
1. มอเตอร์เหนี่ยวนำ |
2. มอเตอร์ซิงโครนัส |
| |
3. มอเตอร์ไฟฟ้ากระแสตรง |
4. มอเตอร์ไฟฟ้ากระแสสลับ |
| |
|
| 10. เมื่อเกิดสนามแม่เหล็กขึ้นภายในมอเตอร์ จะทำให้สิ่งใดหมุน |
| |
1. ขดลวดสนามแม่เหล็ก (Field Coil) |
2. ขดลวดอาร์เมเจอร์ (Armature) |
| |
3. แปรงถ่าน (Brush) |
4. โรเตอร์ (Rotor) |
| |
|
| 11. เส้นสีแดงของมอเตอร์ DC ของแขนและล้อหุ่นยนต์จะเชื่อมต่อเข้ากับสิ่งใด |
| |
1. ไฟ 12 โวลต์จากแบตเตอรี่ |
2. สายดินหรือ Ground (GND) |
| |
3. PIN หมายเลข S30 ของบอร์ด Arduino |
4. PIN2 VCC ของบอร์ด Raspberry Pi |
| |
|
| 12. เส้นสีเขียวและสีเหลืองของมอเตอร์ DC ของแขนและล้อหุ่นยนต์คืออะไร |
| |
1. ควบคุมความเร็วในการหมุนของมอเตอร์ |
| |
2. ควบคุมทิศทางการหมุนของมอเตอร์ (ทวนเข็ม/ตามเข็มนาฬิกา) |
| |
3. รับกระแสไฟฟ้า 12 โวลต์จากแบตเตอรี่เพื่อมาเลี้ยงมอเตอร์ |
| |
4. ควบคุมการทำงานของมอเตอร์ว่าให้หมุนหรือหยุด |
| |
| 13. เส้นสีน้ำเงินของมอเตอร์ DC ของแขนและล้อหุ่นยนต์คืออะไร |
| |
1. ควบคุมความเร็วในการหมุนของมอเตอร์ |
| |
2. ควบคุมทิศทางการหมุนของมอเตอร์ (ทวนเข็ม/ตามเข็มนาฬิกา) |
| |
3. รับกระแสไฟฟ้า 12 โวลต์จากแบตเตอรี่เพื่อมาเลี้ยงมอเตอร์ |
| |
4. ควบคุมการทำงานของมอเตอร์ว่าให้หมุนหรือหยุด |
| |
| 14. หากต้องการเขียนคำสั่งให้หุ่นยนต์เคลื่อนที่ไปข้างหน้าด้วยความเร็วและระยะเวลาที่กำหนด จะต้องใช้คำสั่งใด |
| |
1. MoveForwardWithDelay(80, 100) |
2. MoveForward(100) |
| |
3. MoveBackward(100) |
4. ForwardDelay(80, 100) |
| |
|
| 15. หากต้องการให้หุ่นยนต์แสดงไฟ RGB สีม่วง จะต้องใส่โค้ดคำสั่งตามข้อใด |
| |
1. rgb.fullBody(148, 0, 211); |
2. rgb.fullBody(255, 255, 0); |
| |
3. rgb.fullBody(255, 127, 0); |
4. rgb.fullBody(0, 255, 255); |
| |
|
| 16. โปรแกรมใดใช้ในการออกแบบหน้าจอ GUI |
| |
1. โปรแกรม Thonny |
2. โปรแกรม Canva |
| |
3. โปรแกรม Arduino IDE |
4. โปรแกรม Qt 5 Designer |
| |
|
|
| 17. เมื่อเสียบบอร์ด Arduino เข้ากับบอร์ด Raspberry Pi จะมองเห็น Port ตามข้อใด |
| |
1. /dev/ttyUSB0 |
2. /dev/ttyAMA0 |
| |
3. /dev/ttyS0 |
4. /dev/Serial0 |
| |
| 18. การแทรกรูปภาพบนหน้าจอ GUI ด้วยโปรแกรม Qt 5 Designer จะต้องแทรก Widget ชนิดใด |
| |
1. Push Button |
2. Text Edit |
| |
3. Label |
4. Image |
| |
|
|
| 19. การนำรูปภาพมาวางใน Label จะต้องเข้าไปกำหนดค่าใน Property ใด |
| |
1. pixmap |
2. objectName |
| |
3. geometry |
4. image |
| |
|
|
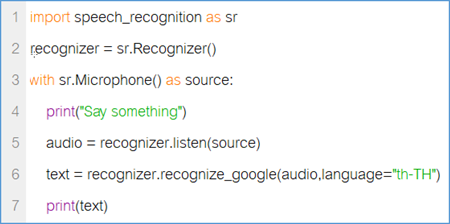
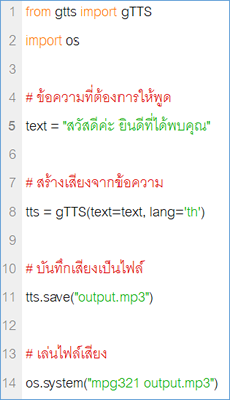
| 20. จากรูป เป็นคำสั่งตามข้อใด |
 |
| |
1. ถาม-ตอบด้วยแชทบอต |
2. แปลงเสียงเป็นข้อความ |
| |
3. แปลงข้อความเป็นเสียง |
4. หุ่นยนต์เคลื่อนที่ |
| |
|
|
| 21. จากรูป เป็นคำสั่งตามข้อใด |
 |
| |
1. ถาม-ตอบด้วยแชทบอต |
2. แปลงเสียงเป็นข้อความ |
| |
3. แปลงข้อความเป็นเสียง |
4. หุ่นยนต์เคลื่อนที่ |
| |
|
|
| 22. การเขียนคำสั่ง Chatbot เพื่อสอบถามข้อมูลต่าง ๆ จากหุ่นยนต์โดยใช้ ChatGPT จะต้องใช้ไลบรารีใด |
| |
1. ไลบรารี่ serial |
2. ไลบรารี่ openCV |
| |
3. ไลบรารี่ openai |
4. ไลบรารี่ chatgpt |
| |
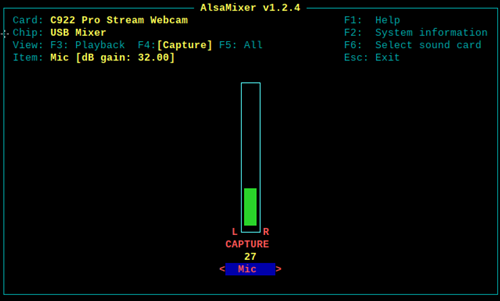
| 23. การปรับเสียงของไมโครโฟน จะต้องพิมพ์คำสั่งใดใน Terminal จึงจะเปิดหน้าต่างด้านล่างขึ้นมา |
 |
| |
1. alsamixer |
2. microphone |
| |
3. arecord -l |
4. aplay -l |
| |
|
| 24. โค้ดคำสั่ง “motor.MoveForwardWithDelay(80,1000);” หุ่นยนต์จะเคลื่อนที่ลักษณะใด |
| |
1. สไลด์ไปด้านซ้าย |
2. เลี้ยวขวา |
| |
3. เคลื่อนที่ไปด้านหน้า |
4. เคลื่อนที่ถอยหลัง |
| |
|
| 25. จากรูปคือคำสั่งใด |
 |
| |
1. คำสั่งเล่นวิดีโอ |
2. คำสั่งแสดงหน้าต่าง GUI |
| |
3. คำสั่งให้รูปภาพ .gif เล่นภาพเคลื่อนไหว |
4. คำสั่งให้เล่นเสียง |
| |
|
|
| 26. การส่งข้อมูลระหว่าง Raspberry Pi และ Arduino ด้วย Serial Port จะต้องใช้ฟังก์ชั่นใด |
| |
1. Serial.readString() |
2. Serial.writeString() |
| |
3. Serial.recievedString() |
4. Serial.readData() |
| |
|
|
| 27. คำสั่งใดเป็นการสั่งให้หยุดเล่นเสียงเพลง |
| |
1. music.stop() |
2. pygame.mixer.sound.stop() |
| |
3. mixer.stop() |
4. pygame.mixer.music.stop() |
| |
|
|
| 28. ข้อใดเป็นคำสั่งในการกำหนดอีเวนต์ของปุ่ม |
| |
1. button.click.connect() |
2. button.pressed.() |
| |
3. button.clicked.connect() |
4. button.onclick() |
| |
|
|
| 29. การสั่งการหุ่นยนต์ด้วยเสียง ใช้ไลบรารี่ใดในการแปลงเสียงเป็นข้อความ |
| |
1. Speech Recognition |
2. gTTS |
| |
3. Serial |
4. openai |
| |
|
|
| 30. การสั่งการหุ่นยนต์ด้วยเสียง ใช้ไลบรารี่ใดในการแปลงข้อความเป็นเสียง |
| |
1. Speech Recognition |
2. gTTS |
| |
3. Serial |
4. openai |